参考資料 日立ドキュメントソリュージョン資料
JMCR2020夏季講習会資料
「GR-PEACH」ではじめる電子工作 (GADGET RENESASプロジェクト著)
走行プログラム・Serial Debug Mode
kit18_gr-peach_jmcr2020_kosyukai_seminar.zip
夏季講習会で貰ったものです。
右クランク、右レーンチェンジのプログラムは入っているので、
左クランク、左レーンチェンジは自分で考えてみて下さい。
通常走行のプログラムは画像のデジタルセンサーと同じ認識です。
クランクおよびレーンチェンジは画像のパターンマッチングを使っています。
こちらで設定したパターンと走行中の画像のパターンが一致した場合
クランクまたはレーンチェンジと判断します。
1 kit18_gr-peach_jmcr2020_kosyukai.zipなど走行プログラムをインポートし、
実行ファイルをマイコンカーに書き込みます。
2 「画像処理4 サーボセンター調整編」で得られたセンター値を
30行目のSERVO_CENTERのところを書き換えて下さい。
3 パターンマッチングを行っている部分
クランクとレーンチェンジです。そこを認識するためのパターンを記述する部分です。
この部分右クランクのパターンです。このパターンにカメラの画像が何%一致したかで判定します。
次に示しますが、このプログラムでは85%を超えると判定されます。判定間違いが多ければ、パターンを吟味するか、一致率を90%に設定するとかすると良いと思います。
0,0,0,0,0,0
0,0,1,1,1,1,1
0,0,1,1,1,0,0
0,0,1,1,1,0,0
4 パターンマッチングの一致率設定部分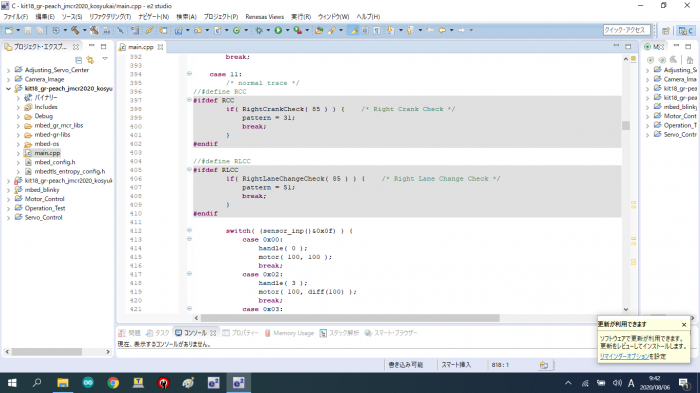
398行目の( 85 ) がパターンマッチングの一致率です。
上の図で灰色になっている行はビルドされませんので、//#define RCCの//は削除して下さい!
//を付けるとこの行に関連する部分は自動的に灰色になりビルドされません。
5 走行プログラム中には様々な状況をモニターできるプログラムが記述してあります。
画像の2値化状況をリアルタイムに見ながら設定したクランクなどのパターンが何%で一致している確認できます。
やり方
・走行プログラムの書き込み
・USBコネクターはそのまま書込側に接続
・Tera-Termを起動
・マイコンカーの電源ON
・GR-PEACHの「リセットボタン」と「ユーザーボタン」を同時に押したままに!
・RGBーLEDは消灯し
・先にリセットボタンを放す
・RGBーLEDは最初 赤でゆっくり点滅、しばらくすると青色高速点滅する
・青色が高速点滅したところで「ユーザーボタン」を放すとTera-Term画面にメニューが表示される
・後はメニューにしたがって下さい。
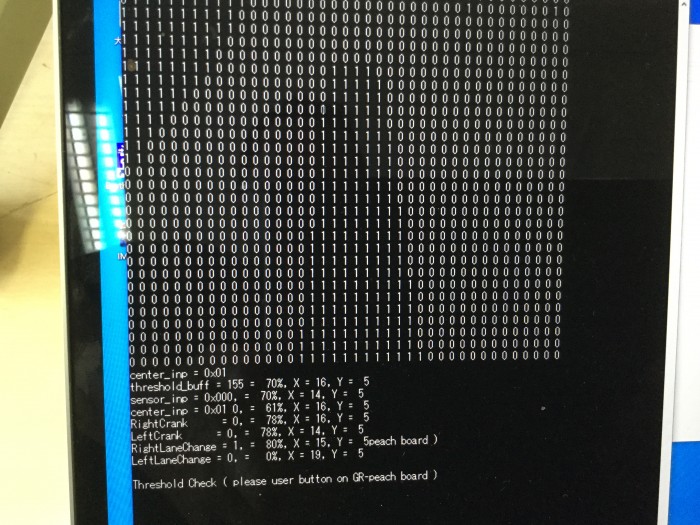
ここでは私の作った左右クランク・レーンチェンジまで入れたものを実行させています。
マッチング率は80%に設定しました。写真では右レーンチェンジが80%に達したので1と判定されています。
しかしその他の部分も70%を超えていて微妙なマッチング率ですね。

動画
https://youtu.be/JcoRHwkkl9A
4 あとはプログラムを色々改良してみて下さい。
改良点は 上記のパターンだけではありません。
当然それに付随する変更箇所がいくつかあります。
右クランク・レーンチェンジを参考にチャレンジしてみて下さい。
ルネサスの講師の方は、パターンマッチングでは無い方法も現在考えているとのことでした。
これからますます画像処理分野は進化して、さまざまなレギュレーションも追加されると思います。
社会においても自動運転の自家用車も増えてきています。
工業高校にとっては最先端ながら身近な研究教材として良いのではないでしょうか。
これで走行・Serial Debug Mode編は終了です。
